
ELECTRICAL PARTICLE GENERATOR
Objective: To overcome the opposing magnetic field problems associated with rotary electrical generators.
PRE-HISTORY TO DEVELOPMENT:
To satisfy Maxwell and Faraday Laws of inductance to produce electrical energy, a magnetic field must pass through a conductor or a conductor must pass or move through a magnetic field. In each case the results are the same. This now establishes the basic operational parameter related to rotary electrical generators.
To design said rotary electrical generator, the following design parameters must be utilized to reach maximum operational performance:
POWER FACTOR OF DESIGN:
- Strength of Magnetic Field (number of magnetic flux lines)
- Velocity or speed at which a magnetic field passes through a conductive wire
- Number of loops or turns per wire-coil
- Number of pickup coils
- Energy input to produce and maintain said rotating electromagnetic field (applied electrical energy)
- Energy input to rotate or move said electromagnetic field (applied mechanical energy)
Point-of-Observation:
A magnetic flux line does not show signs of deterioration when passing through an electrical conductive wire.
Observations-Test:
An electromagnetic field emanating from a permanent magnet rotating inside an electrical wire-coil produces electrical energy. Said permanent magnet requires no energy input to maintain said magnetic field, see Thomas Edison generators.
Typical Rotary Electrical Generator:
Car Alternator
Operational Characteristics: maximum duty loading
- Apply 120 watts (12 volts x 10 amps) of electrical power to armature winding to produce said electromagnetic field.
- Apply 5,222 watts (7 hp x 746 watts) to "start" and "rotate" said armature to move said electromagnetic field through said pickup coils during maximum duty loading.
- Three rotor pickup coils (300 turns per coil; 3 coils per stator ring array) produces 720 watts (12 volts x 60 amps) output during said maximum duty loading.
Second Point-of-Observation:
The opposing magnetic fields (a xxx an) (opposite polarity attraction) between said armature and said stator ring consumes tremendous amounts of mechanical energy during deformation of said attraction fields (a), see Figure 25ZA.
Said opposing magnetic fields (a) resist said armature rotation.
Observation Test:
Once said electromagnetic circuit is formed (a), said opposite polarity attraction (north to south magnetic pole interaction) tries to prevent armature rotation.
A stationary armature (electrically energized) cannot rotate without exerting mechanical torque (rotational force) energy to said armature.
Said mechanical energy input is directly proportional to said magnetic field strength (a).
Increasing said electromagnetic field strength (a) requires an increase in mechanical energy input.
Counter EMF electrical field is not formed around said pickup coils since said armature is stationary during static testing.
Scientific Fact:
Said Maxwell/Faraday Laws of inductance require that a magnetic field must pass through said pickup coil to generate a counter EMF electromagnetic field, see Exhibit AZ, McGraw-Hill Encyclopedia of Science and Technology, Vol. 6, page 144.
Point of Discovery:
Elimination of said "Air Gap" attraction problem can help reduce energy input requirements to produce electricity.
The Birth of New Technology: Electrical Particle Generator (EPG)
Design Objective:
To move and attenuate a permanent magnetic field through a pickup coil array without said "Air Gap."
Electrical Particle Generator: Assembly & Operability
A) Magnetic Pathway: Closed loop system
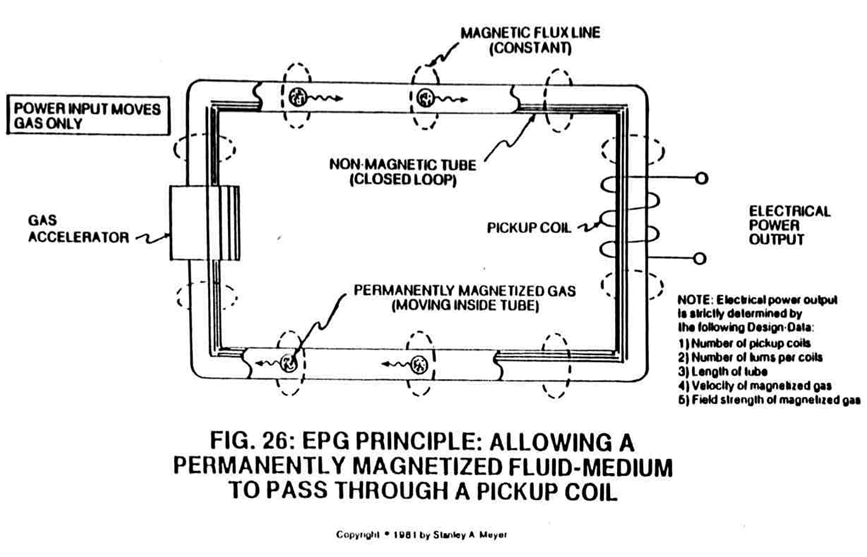
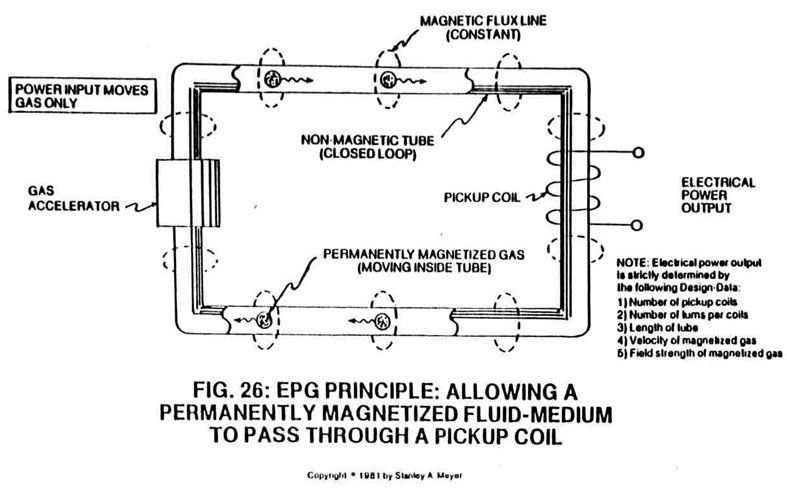
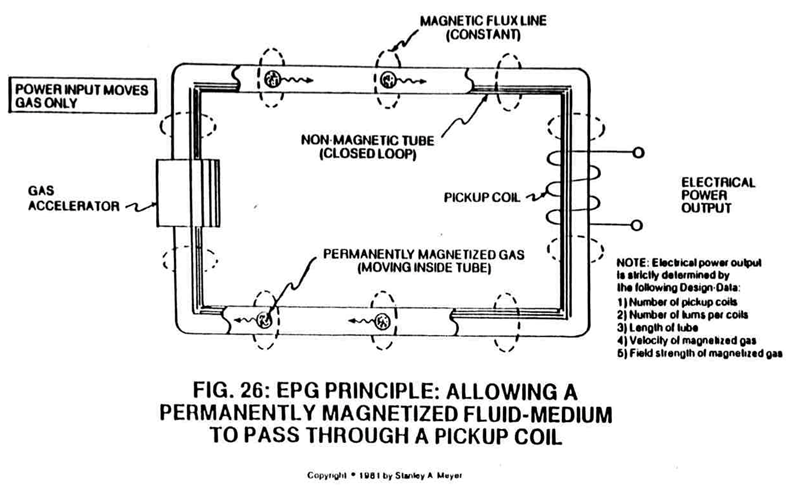
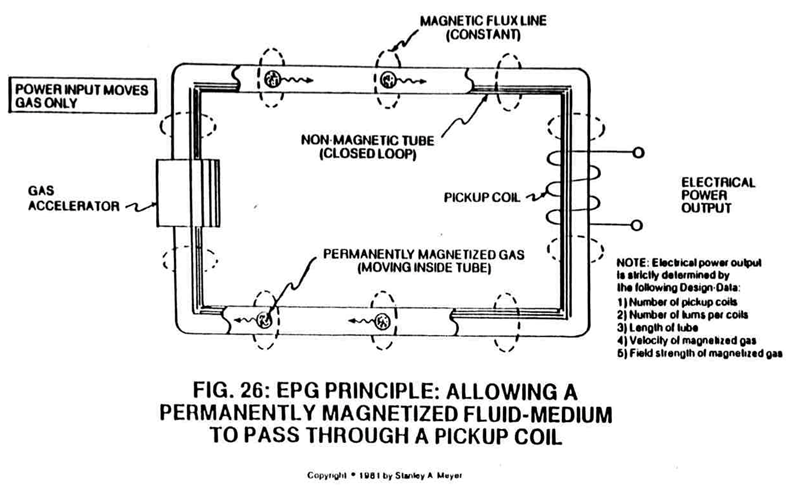
Take a non-magnetic tube (material that will not become permanently magnetized when exposed to a magnetic field and having the capability of distorting said magnetic field through said tubular material without signal distortion… such as aluminum, brass, glass, and/or plastics) and form a closed loop pathway (without open ends), as illustrated in (1) of Figure 26 through Figure 30.
 |
 |
 |
 |
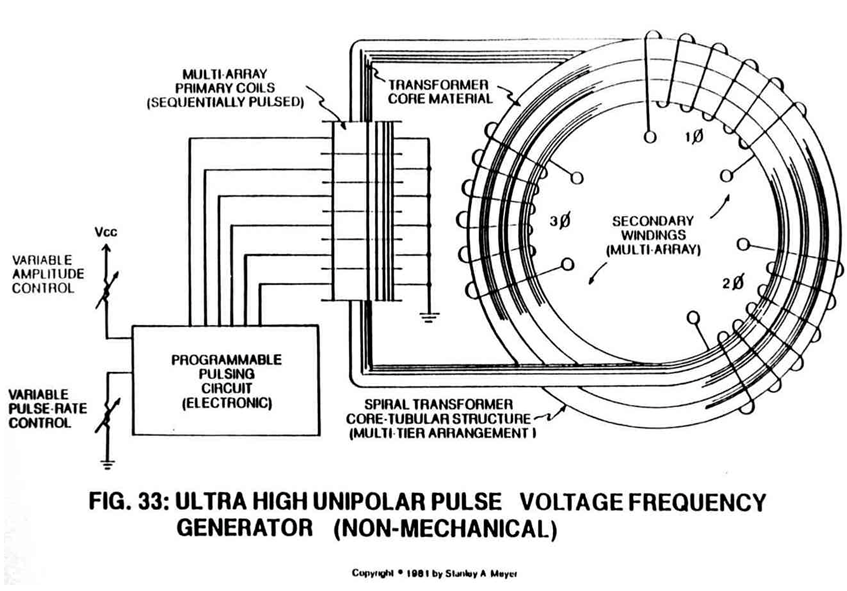
Said tubular pathway (1) can be extended into a spiral configuration (8) of Figure 33.
B) Pickup Coil: Type & Coil Arrangement
Wrap a wire-coil (2) and/or coil-array (2a xxx 2n) around one end of said non-magnetic tube (1) to comply with Maxwell/Faraday Laws of Inductance.
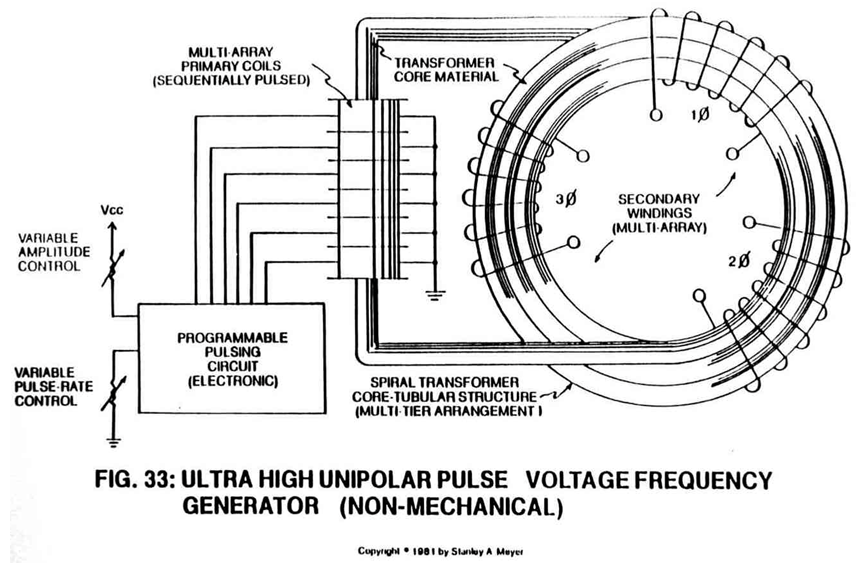 Said pickup coil (2) is placed around said spiral pathway (8) of Figure 33 to form a coil-array (2a xxx 2n).
Said pickup coil (2) is placed around said spiral pathway (8) of Figure 33 to form a coil-array (2a xxx 2n).
C) Particle Accelerator Assembly: Purpose & Placement
Insert into and affixed a Particle Accelerator Assembly (10) to said closed loop tube (1) as to (8), locating said Particle Accelerator Assembly on opposite end of tube (1) away from said pickup windings (2 xxx 2n), as shown in Figure 26.
Said Particle Accelerator Assembly (10) causes and propels a permanent magnetic fluid-medium (3 of Figure 26) (liquid slurry or gases) to move toward, through, and beyond said pickup coils (2) for recycling, as illustrated in Figure 26.
Said Particle Accelerator Assembly (10) can take on different design configurations to utilize different energy inputs to overcome different climatic and operational conditions.
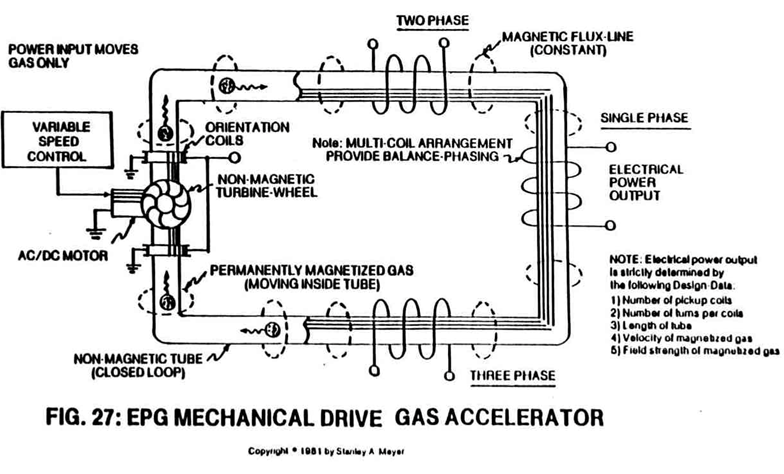
A Mechanical Accelerator Drive Assembly (20 of Figure 27) utilizes a non-magnetic turbine wheel (21) to physically move said magnetic fluid-medium (3) inside said tubular pathway (1).
|
 |
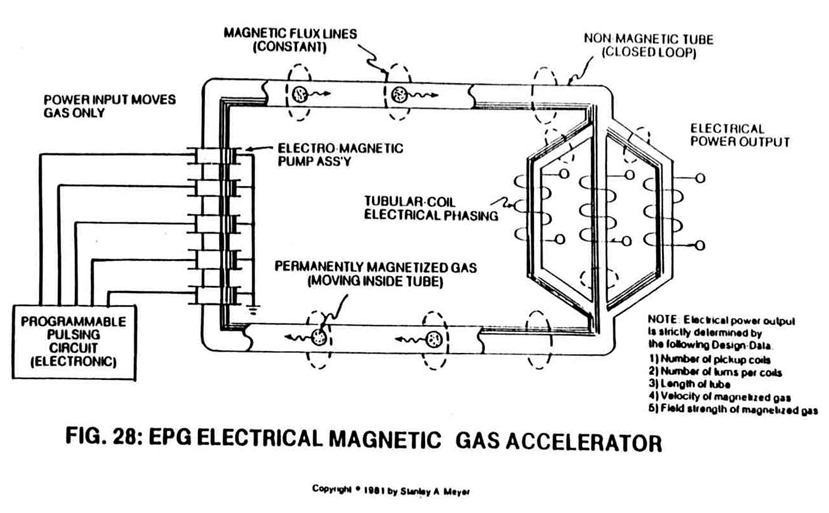
Electromagnetic Pump Assembly (30 of Figure 28 as to Figure 33) moves said fluid-medium (3) by way of electromagnetic deflection, see Figure 26F.
 |
|
Said mechanical drive system (20) and/or Electromagnetic Pump Assembly (30) can be used separately, joined together, or periodically spaced around said tubular structure (1) as to (8).
D) Energy Input: Mechanical to Electrical Interfacing
Power Train linkage (22) to said non-magnetic turbine wheel (21 of Figure 27 can take different forms:
AC/DC Electric Motor powered by solar or conventional electrical power; Hydraulics; Steam Power; Wind Power; Internal combustion engine, and/or manpower.
Electromagnetic Pump Assembly (30 of Figure 28 as to Figure 33) is energized by a variable AC electrical power source (34).
|
|
E) Permanently Magnetized Fluid-Medium: Liquid Slurry to Gas Formation
Fill said closed loop tubular pathway (1) as to (8) with a permanently magnetized material (3), as illustrated in Figures 26, 27, 29, and 30.
|
|
|
 |
Said permanently magnetized material (3) can either be in a liquid slurry and/or gas form.
Said liquid slurry is composed of micro-size permanently magnetized particles suspended in a fluid-medium such as liquid Teflon or light-oil, forming a homogeneous liquid-mass.
Said permanently magnetized gas is composed of atom-size permanently magnetized particles suspended onto an inert carrier gas such as nitrogen argon, forming a homogeneous gas-mass.
Both homogeneous masses can be doped with different permanently magnetized atoms to encourage electromagnetic field enhancement.
Scientific Fact:
The smallest part of a permanent magnet is its atomic structure.
F) Magnetic Field Formation: An Electronic Process
Once said tubular pathway (1) as to (8) is completely filled with said permanently magnetized material (3), said pickup coil-array (2a xxx 2n) is electrically energized to produce an electromagnetic field that completely surrounds said tubular pathway (8) of Figure 33, exposing said magnetic material (3) to said electromagnetic field... causing said material (3) to become permanently magnetized...forming a longitudinal field (4) of Figure 26 emitting from said tubular pathway (1).
Said longitudinal field (4) remains after said coil-array (2a xxx 2n) is de-energized.
 |
|
No other energy is needed to maintain said magnetic field (4).
Electronic Fact: At this point, above said magnetizing process duplicates the same function as a Toroidal Pulsing Core in electronic circuit applications. Except said Toroidal core material becomes demagnetized after electrical power is removed.
G) Magnetic Fields Movement: Linear Spin
Longitudinal movement (moving permanently magnetized fluid-medium inside said tubular pathway) of said magnetic field (4 of Figure 26) is simply accomplished when said Electro/mechanical Pump Assembly (20) of Figure 27 and/or Electromagnetic Pump Assembly (30) of Figure 28 is energized for operability.
 |
|
|
By attenuating or varying power input to said power drive systems (20 and/or 30) likewise varies the recycling speed or velocity of said magnetic field (4) moving toward, through, and beyond said pickup coil-array (2a xxx 2n)... moving onward to and through said Power Drive Assembly (20 and/or 30) once again for continued field recycling.
|
|
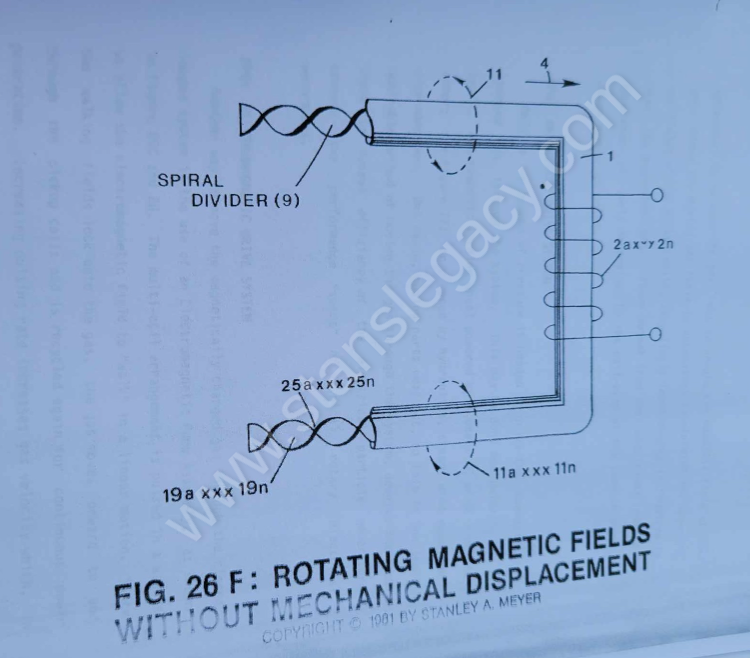
To spin or rotate said magnetic field (4) as to (11 of Figure 26) on its longitudinal axis while moving in a linear direction (4 of Figure 26, 27, and 28) as described above, a Spiral Divider (9) of Figure 26F is now inserted into said tubular pathway (1) leading away from and connecting said Power Drive System (20/30), said Spiral Divider (9) passing through said pickup coil-array (2a xxx 2n), said Spiral Divider (9) terminating at and not passing through said Power Drive System (20/30), as shown in Figure (26F) as to Figures (26, 28, and 33).
|
|
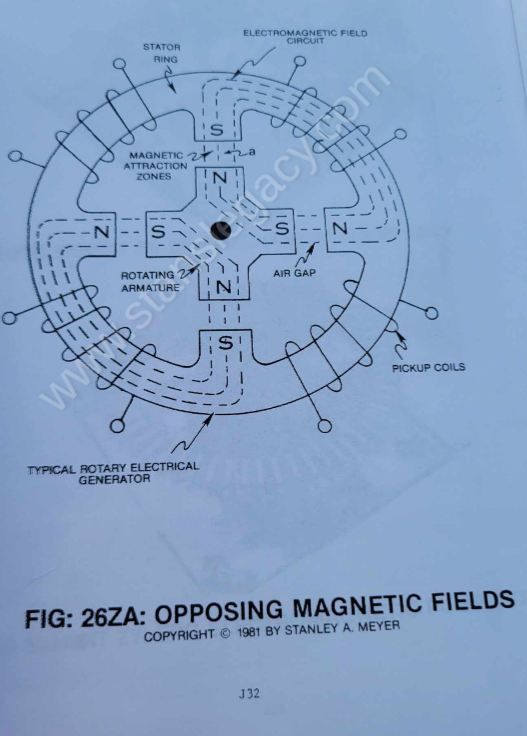
The linear-spin movement of said magnetic field (4/11) now duplicates the magnetic field spin of Figure 26ZA without the opposing magnetic field problem (caused by said "Air Gap") associated with standard rotary electrical generators, see "Pre-History to Development" again.
Said Rotary Electrical Generator (Figure 26ZA) simply moved the armature field in one direction;
whereas, the EPG System now moves said magnetic field (4/11) in two directions simultaneously:
(4) linear direction,
(11) axial or spin rotation.
H) Magnetic Field Deflection: Oscillating a permanent magnetic field
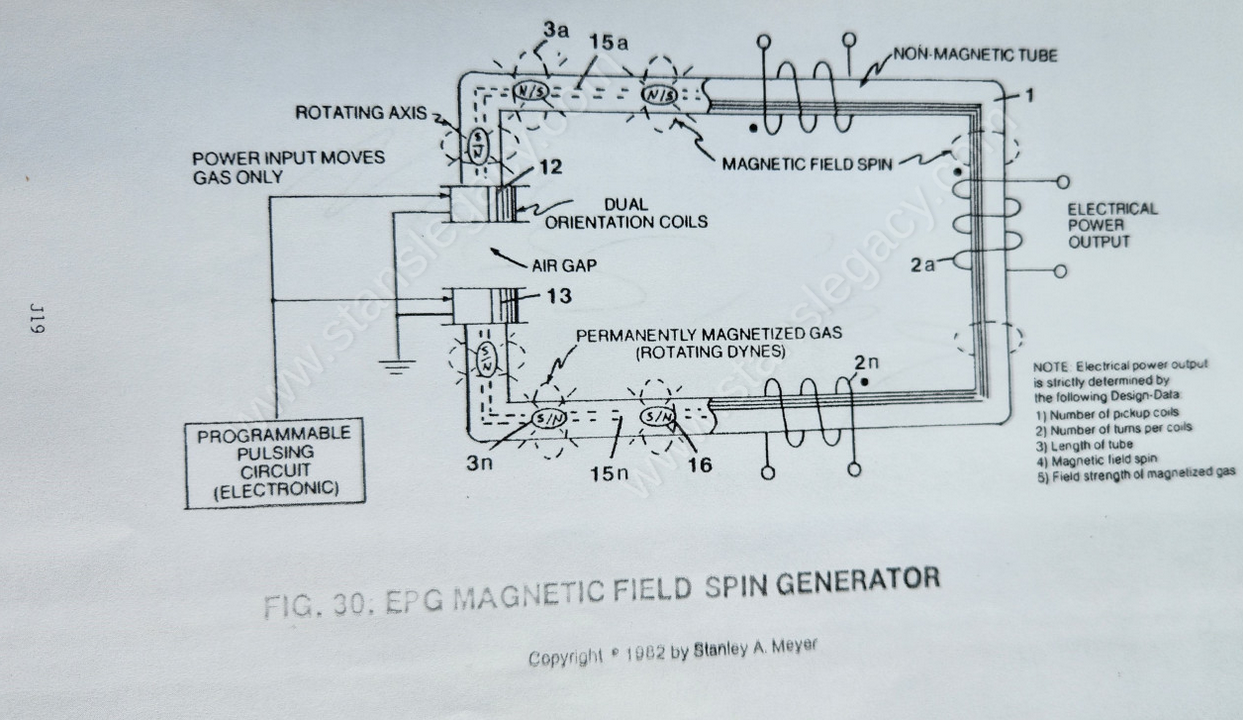
To pulsate or vary said rotational field (11) moving in a linear direction (4), Dual-Orientational coils (12/13 of Figure 27) are now inserted into said tubular pathway on opposite side of Electromechanical Drive System (20), away from said pickup coil-array (2a xxx 2n), as illustrated in Figure (27) as to Figure 30.
|
|
The dual-pulsing coils (12/13) perform a sequential function:
First, when electrically energized, said dual-coils (12/13) stabilize said magnetic field (4/11) since said turbine wheel (21 of assembly 20) disrupts the electromagnetic field alignment (15a xxx 15n) (electromagnetic attraction force) between said permanently magnetized particles (3a xxx 3n) moving inside non-magnetic tubular pathway (1 as to 8), see Figure 27 as to Figure 30.
Secondly, said moving field (4/11) is terminated when said dual-coil assembly (12/13) is de-energized... allowing said particles (15a xxx 15n) to go into a state of reformation of said magnetic field sequence.
Re-energizing said coils (12/13) causes said particles (3a xxx 3n) to go into alignment once again... reforming magnetic field (4/11).
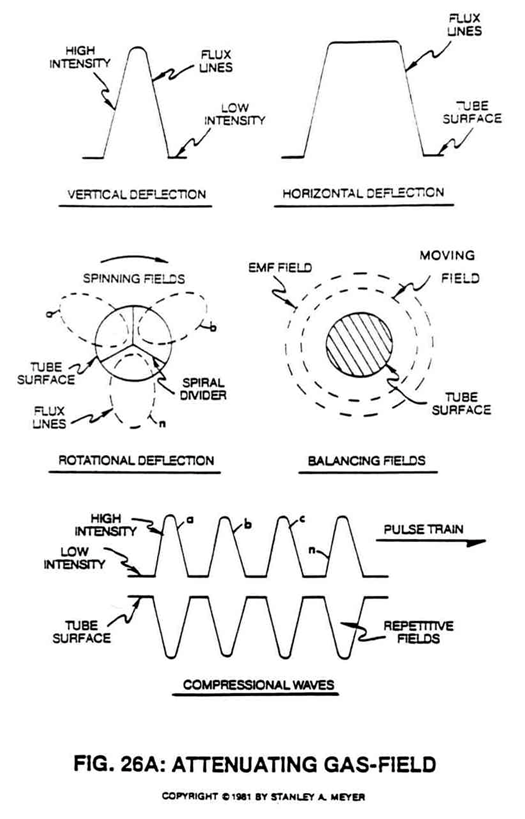
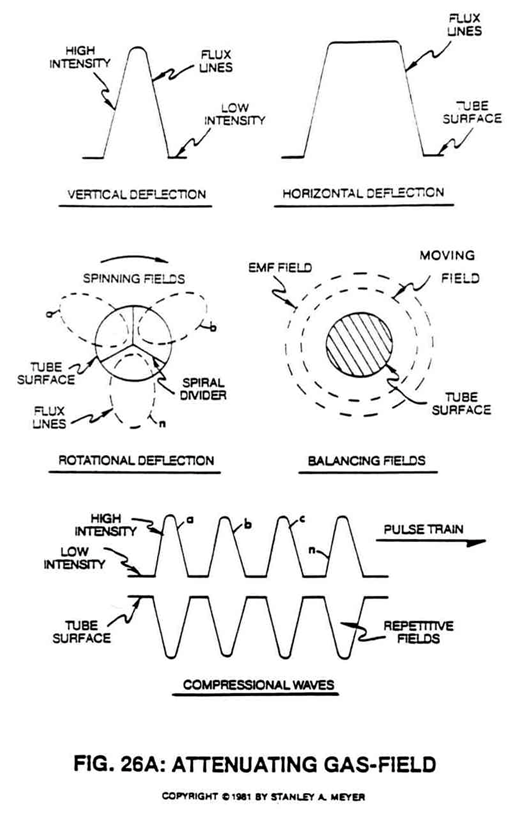
Pulsing said Orientation-coils (12/13) quickly causes a vertical deflection (17a xxx 17n of Figure 26A) of said magnetic field (4/11).
Pulsing said Orientation-coils slowly causes a horizontal deflection (18a xxx 18n of Figure 26A) of said magnetic field (4/11).
In both cases, said reforming magnetic wave-forms (17a xxx 17n and/or 18a xxx 18n) are oscillating inside said coil-array (2a xxx 2n)... producing electrical energy.
Pulse-frequency electrical output (23 of Figure 30 as to Figure 27) is strictly determined by the pulse-rate of said orientation coils (12/13).
|
|
Said Orientation Coil Assembly (12/13) is similar in design and simply creates an electromagnetic field equal to said electromagnetic attraction force (15a xxx 15n).
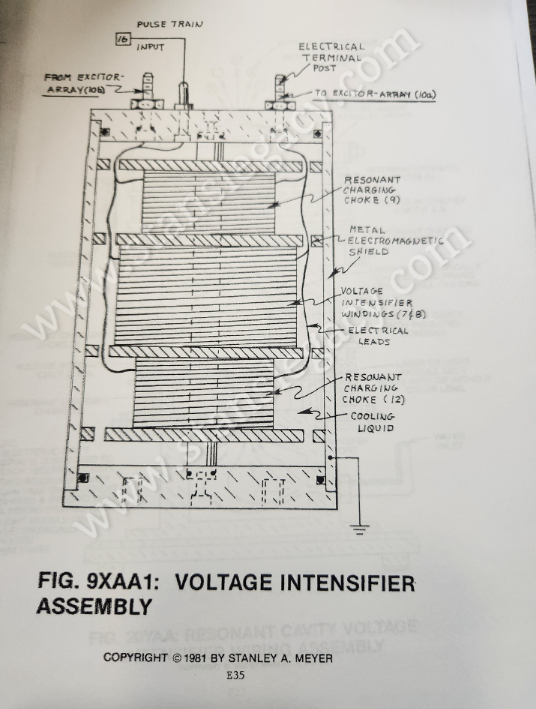
Variable Pulse Voltage Frequency Generator (14 of Figure 27) (Figure 9XB as to Figure 9XAA) is used to trigger or energize said pulsing coils at the same time (12/13) during particle (3) deflection.
|
 |
Transformer interaction (magnetic field coupling) between said Orientation Coils (12/13) and said pickup coils (2a xxx 2n) can "NOT" occur since said particles (3a xxx 3n) are permanently magnetized.
The magnetic pulsing process simply spins the dyne-axis of said particles (3a xxx 3n) to oscillate and attenuate a permanent magnetic field (4/11 as to 17/18), as illustrated in Figure 30 as to Figure 26 through Figure 33.
|
|
The magnetic pulsing action (17/18) duplicates the magnetic-pulsing action of Figure 26ZA without "the opposing magnetic field problem" (caused by said Air Gap) associated with standard rotary electrical generators, see "Pre-History to Development" once again.
A three-directional magnetic waveform is now formed and used during EPG electrical power generation:
Spinning (11) said pulsating magnetic field (17/18) in a linear (4) direction... simultaneously.
Prior Art simply moves the magnetic field in one direction only, see Figure 26ZA again.
I) Magnetic Field Clustering: Increasing Magnetic Flux Lines
To move more magnetic flux lines through said pickup coil-array (2a xxx 2n) while keeping said particle (3a xxx 3n) velocity constant, said Spiral Divider (9) of Figure 26F is now subdivided into many pathway channels (19a xxx 19n), as illustrated in Figure 26A sub-titled "Rotational Deflection."
The multi-channel spiral divider (19a xxx 19n) is composed of any type of material (such as electrical steel M27) that will "NOT" become permanently magnetized (when exposed to said moving magnetic field (4)) when "shunting" said magnetic field (11a xxx 11n), as shown in Figure 26A sub-titled "Rotational Deflection."
|
|
|
Since each spiral channel pathway (19) performs the same function as said pathway (1), many magnetic flow circuits (11a xxx 11n) are formed as to the number of said pathway channels (19a xxx 19n).
If more longitudinal magnetic fields (19a xxx 19n) are required... simply increase the number of pathway channels (19).
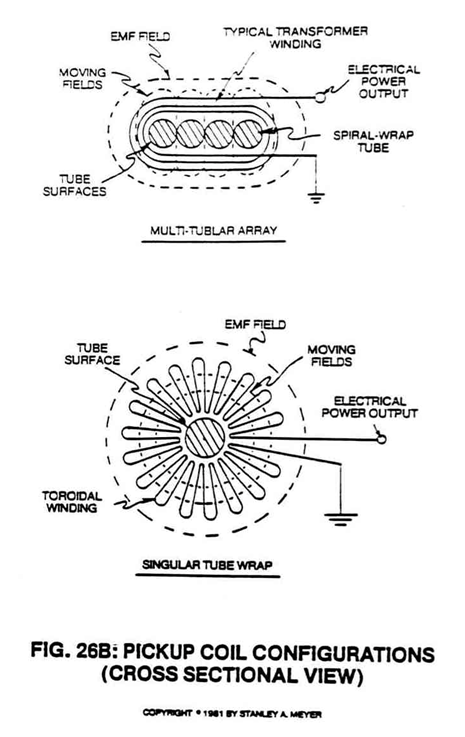
To increase said magnetic flux lines (11a xxx 11n) still further, said pathway (1) is now spiraled (8 of Figure 33) (in spaced relationship to each other) inside said pickup coil-array (2a xxx 2n), as illustrated in Figure 33 as to cross-sectional drawing titled "Multi-tubular array"of Figure 28A.
The greater number of spiral-turns (8a xxx 8n) the greater number of right-hand lines transverses said pickup coil array (2a xxx 2n) during pulse-form stage.
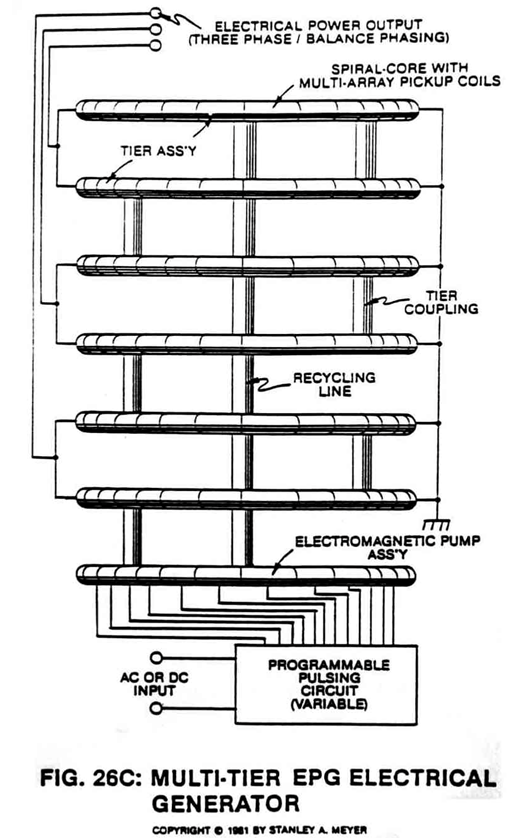
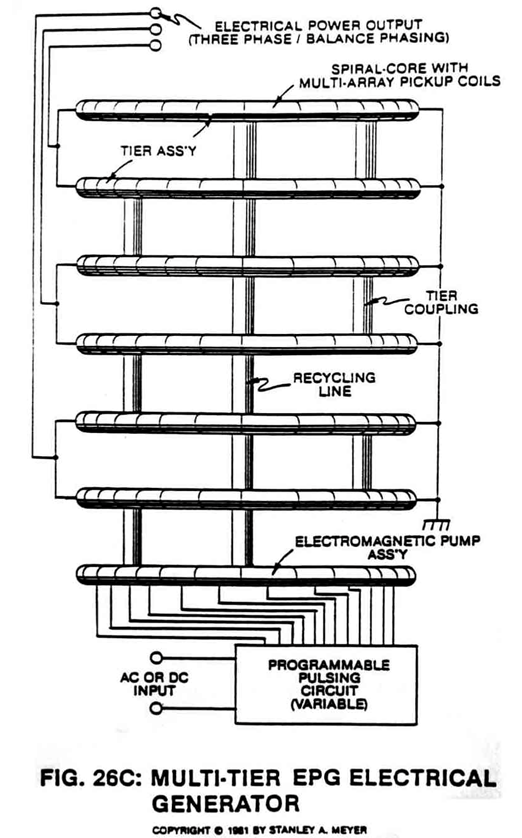
The number of "shunting" magnetic fields (11a xxx 11n) times (x) the number of spiral pathways (8a xxx 8n) determine the magnetic field strength of said EPG system of Figure 26C.
 |
|
J) Magnetic Spin Enhancement: Exceeding Mechanical Rotational Devices
To speed up said magnetic field spin (11a xxx 11n), simply increase the velocity of said magnetized fluid-medium (3a xxx 3n) traveling through said pathways (19a xxx 19n)... or vice versa.
By increasing the number of turns (twist configurations) (25a xxx 25n of Figure 26F) per linear measurement of said spiral-divider cluster (19a xxx 19n) also increases said magnetic spin (4/11) still further once said fluid-velocity (4) is reached.
In both cases, said magnetic field spin (11a xxx 11n) is not subject to the rotational/mechanical limitation of said Rotary Electrical Generator of Figure 26ZA.
|
|
K) Pickup Coil Arrangement: Multi-Phasing/Balance Phasing
Electrical power output phasing (26 of Figure 33) is accomplished by simply wrapping said pickup coil (2) in opposite direction: Right-hand Movement (27) and/or Left-hand Movement (28).
Positive unipolar DC pulses occur when Right-hand coil wraps (27a xxx 27n) are "grouped together" in a sequential arrangement.
Negative unipolar DC pulses occur when Left-hand coil wraps (28a xxx 28n) are "grouped together" in a sequential arrangement.
Alternate unipolar pulses (AC sine wave) occur when said Right-hand coil (27) is series linked to said Left-hand coil (28).
--- Unidirectional pulsing (27/28) occurs since the Linear-Spin movement (11) of said pulsating magnetic field (17/18) is moving in one direction.
--- Balance-Phasing (equal magnetic field strength between said pickup coil-array 2a xxx 2n) is automatic since particle velocity (4) remains constant while passing through said close-loop tubular pathway (1).
Series to parallel hookup of said coils (2a xxx 2n) determines amp draw as to applied voltage. Power Output = Amps x Voltage.
Pickup coil-array phasing (26a xxx 26n) also occurs when splitting said tubular pathway (1) into parallel legs (1a xxx 1n), as shown in Figure 28.
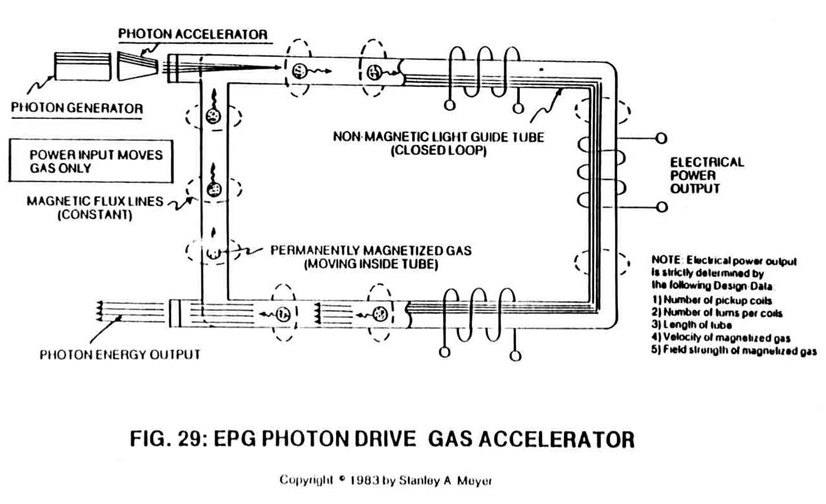
Electrical Power Output: Power Factor of Design
Electrical power output of said Electrical Particle Generator (EPG) is determined as subscribed below:
-
The velocity or movement of said permanent magnetic fluid-medium (3a) inside tubular pathway (1) (magnetic field movement per second in a linear direction).
-
The number of pathway-channels (19a xxx 19n) per spiral-divider (9) forming magnetic circuits (11a xxx 11n) per spiral-divider (9) spinning in a linear direction per 360 degrees (the number of magnetic fields formed per second).
-
The number of turns or twist per (25a xxx 25n) unit length of said spiral divider (9) inserted into said tubular pathway (1), the number of magnetic fields spins of said multi-fields (11a xxx 11n) per second of linear-travel.
-
The magnetic field strength (number of magnetic flux-lines per unit volume of said magnetic fluid-medium (3)).
-
The number of tubular-legs (8a xxx 8n) spiraled inside said pickup coil-array (2a xxx 2n). The number of multi-rotational fields (11a xxx 11n) formed per turns of tubular legs (8a xxx 8n).
-
The pulse-rate frequency of said orientational coils (12/13) to spin or rotate said dyne-axis of said magnetic fluid-medium (3) to oscillate said permanent magnetic field (11a xxx 11n).
-
The number of turns per coil of wire.
-
The number of coils per coil-array (2a xxx 2n).
L) Power Input: To Start & Maintain EPG Operations
Power input is required to move said magnetic fluid-medium (3) through said closed-loop tubular pathway (1).
Power input is also required to rotate said dyne-axis of said magnetized fluid-medium (3).
The basic purpose of said power input is to physically attenuate said permanently magnetized fluid-medium (3)... which in turn oscillates a permanent magnetic field (4/11).
M) EMF Counter Measures: Minimizing Power Input
To help minimize opposition to the movement of said magnetic fluid-medium during power on-stage, said pickup coil array (2a xxx 2n) of Figure 33 as to Figure 26F is placed and aligned end-to-end around said pathway (8a xxx 8n) for the purpose of coupling and forming a single and continuous magnetic field (31) or any type of electromagnetic field emanating from said pickup coil-array (during duty loading) is wrapped and positioned around said pickup coil-array (2a xxx 2n)... forming a concentric magnetic ring (31) around said pickup coil-array (12/13) as illustrated in Figure 26A sub-titled "Balancing Fields."
Said oscillating magnetic ring (31) also forms a concentric magnetic ring (29) inside and below said tubular pathway (1).
The space formed (32) between said magnetic fields (29 and 31) allows said magnetic lines to cross one another... reducing the opposition to the magnetic field movement.
In other words, passing the force-lines between each other magnetic field without said fields opposing each other.
Maxwell/Faraday Laws demonstrate that a space is formed between magnetic flux-lines... this is also known as the standing magnetic wave theory.
By synchronizing said magnetic compression wave (oscillating magnetic field 17/18) with said EMF field (31) termination, EMF field opposition is held to a minimum.
See Figure 26A subtitled "Compression Waves."
When EMF field (31) is formed, said pulsating magnetic field (29) forming concentric ring (29) is turned off (switched off).
 |
|
After EMF field collapses, magnetic pulsating field (29 of Figure 26) is reformed once again... starting and continuing the on/off switching process in a sequential manner as pictorially illustrated in Figure 26A.
In the field of electronics it is known that an EMF field is "NOT" formed until after a magnetic field passes through a pickup coil.
O) Electromagnetic Pump Assembly: Assembly & Purpose
To bypass and overcome the mechanical limitation of said Turbine Pump Assembly (20 of Figure 27), the Electromagnetic Pump Assembly (30 as to Figure 26F) in relationship to Figure 26C is utilized to propel said fluid-medium (3a xxx 3n) of Figure 26 as to Figure 26C.
|
|
The Electromechanical actuator (Electromagnetic Pump Assembly (30)) attached to said tubular pathway (1) operates as a direct-drive principle of a linear induction motor.
 The coil-array (35a xxx 35n) of Figure 26C, besides being the stator, the magnetic field medium (3a xxx 3n) is displaced along a movable/non-movable electromagnetic tubular surface (of Figure 26C) which, in reference to Figure 28) acts as a bearing surface (since said surface (35a xxx 35n) is fixed).
The coil-array (35a xxx 35n) of Figure 26C, besides being the stator, the magnetic field medium (3a xxx 3n) is displaced along a movable/non-movable electromagnetic tubular surface (of Figure 26C) which, in reference to Figure 28) acts as a bearing surface (since said surface (35a xxx 35n) is fixed).
|
 |
Said lubrication is also applied to the outside core (30) above Section E) intermittent with said magnetic-fluid mass lines (3a xxx 3n) allows said rod-shape particle-mass to move through said stator assembly (30).
The linear motion of said moving fluid-medium (3a xxx 3n) through the stator assembly (30) is shown in Figure 26A to Figure 33F of Figure 26B which is essentially a series of coils as stator assembly (30) which is essentially a series of coils as stator assembly (35a xxx 35n) of Figure 26C as to Figure 26 and Figure 33.
|
|
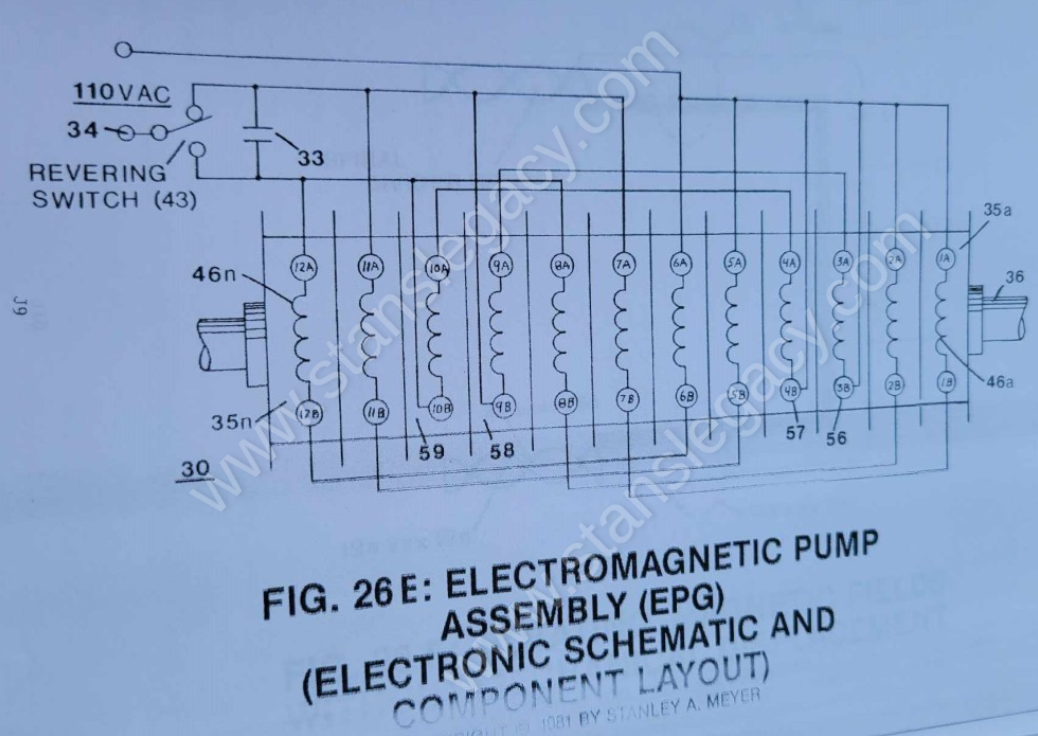
The magnetic pump assembly (30) may operate on three-phase alternating current or with a capacitor (33) (see schematic drawing Figure 26E as to Figure 26C) on single-phase alternating current.
 |
|
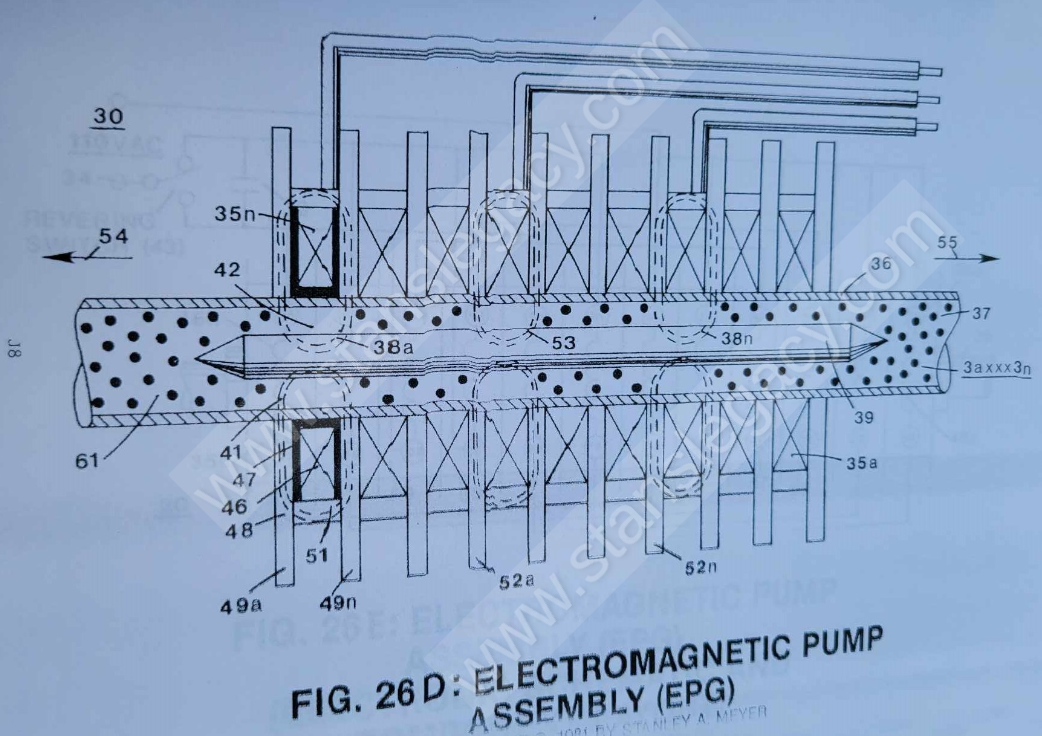
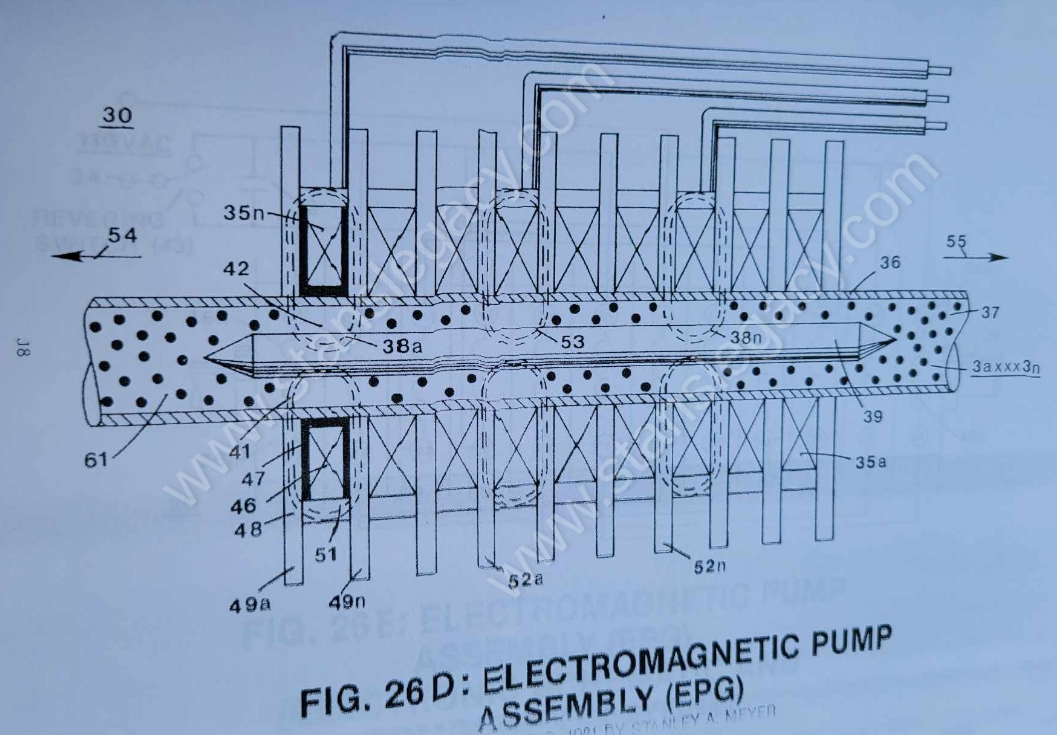
A simple mechanical switching (43 of Figure 26E) reverses the sweep of fields (38a xxx 38n) and moves the direction of fluid-medium (3) travel.
Double-phase or three-phase control is applicable to force control that would be needed for mechanical applications.
Output Force (magnetic field deflection to move mass) can be extended to beyond 300 pounds under normal duty loading.
Three-phase operations. Stator Assembly (30a xxx 30n) can be combined or built specially for higher forces.
P) Electromagnetic Pump Assembly: Operational Parameters
Force vs. fluid-medium (3) displacement: Uniform during movement and recycling.
Force and speed controllability: Force is directly proportional to power and voltage squared. Force can be controlled by varying input voltage, resulting in variable speed control.
Current vs. fluid-medium displacement: Uniform during movement and recycling. No high in-rush current.
Fluid-medium (3) velocity: Fluid-mass acceleration occurs in less than 10 milliseconds and reaches a controlled speed (or velocity) during recycling. The time or distance needed to perform normal operational speed of fluid-velocity depends upon net force "applied" and fluid-mass being moved. Normal operating velocity is 30 fps for single-phase units (30) and 90 fps for three-phase units (30/30/30).
Force vs. duty cycle capabilities: Duty cycling (stator on-time) is only limited to heat dissipation ability.
Q) Electrical Pump Assembly: Design Specs
Coil (46) is wound (400 turns 30 ga. insulated wire) on molded nylon bobbin (47) that is placed inside a magnetic "shunt-assembly" (48) and slipped over said tubular bearing (36), as illustrated in Figure 26E as to Figure 26F and Figure 28.
|
|
Said Magnetic "Shunt" Assembly (48) is composed of two metal discs (49a/49b) placed on opposite sides of said coil-bobbin (46/47) with Magnetic Key (51) situated between said pallets (49a/49b) adjacent to and wrapping said coil-bobbin (46/47).
A second magnetic bar key (39) is inserted into said tubular pathway (36) and properly aligned to said coil-array (30/30)... forming an air gap (42) between said tubular surface (36) and said Magnetic Key Assembly (39)... completing the field effect forming said cavity (41)... and structuring pulsing effect itself (35).
|
|
Said pulse circuit (35) is now placed end-to-end (35a xxx 35n) to said coil circuit assembly (30) for magnetic force, as illustrated in Figure 26E and Figure 28 and Figure 33.
Said metal discs (49a/49b) are extended beyond said Magnetic Key (51) to provide open air fins (52a xxx 52n) for the purpose of heat dissipation during coil pulsing.
|
|
Said Magnetic "Shunt" Assembly (48) is composed of electrical steel that will push the magnetic field toward said moving permanently magnetized mass, as illustrated in Figure 26F.
Typical cross-sectional diameter of said tubular pathway (36) may vary up to and beyond 1/2 inch O.D.
R) Electromagnetic Pump Assembly: Electrical Activation
Voltage applied to coil (46) causes current flow and creates magnetic field (41) that passes through said magnetic shunt (48)... causing magnetic flux-lines (48) to align said field effect to said fluid-mass (3).
Once the magnetized fluid-mass (3) is aligned by said magnetic deflection (pulsing) attraction forces (53 of Figure 26C) and "locks-onto" said permanently magnetized fluid-medium (3a xxx 3n).
Electromagnetic fields emanating from a coil-magnet (like 46) and a permanent magnet (like 4) are the same in electromagnetic characteristic.
Wiring of said coils (46a xxx 46n) in proper sequence (see wiring schematic Figure 26E) with said capacitor (33) produces a sweeping magnetic wave (38a xxx 38n) across said fluid-mass (3), thus allowing said fluid-mass movement (54).
Applied AC electrical power (110 Vac 60 Hz) to said capacitor (33) provides an electrical charge/discharge cycling rate that allows adjacent coils to be fired in proper sequence.
In other applications, said charging capacitor (33) can be replaced by an AC Triac triggering circuit or SCR triggering circuit.
In terms of electrical reversibility, Directional Switch (43) applies AC electrical power to opposite side of said capacitor (33) to cause said magnetic sweeping field (38a xxx 38n) to reverse in direction (55).
Coil-arrangement as to Electrical Hookup (56/57 and 58/59) of Figure 26E provides temporary "Breaking Power" during switching operations.
By simply varying applied voltage and pulse triggering rate, likewise varies magnetic mass velocity (61).
To reach maximum acceleration performance, said Magnetic Keeper Bar (39) moves said moving fluid-mass (3) closer to said bearing surface (36)... enhancing magnetic attraction force (53).
To obtain maximum operational efficiency of said Stator assembly (30), said magnetic keeper-bar (39) also acts as a magnetic field spoiler by disrupting particle alignment (15a xxx 15n of Figure 30)... collapsing magnetic field (4/11) prior to particle entrance into said Stator Assembly (30).
Said magnetic field (4) reforming after exiting said Stator Assembly (30).
S) Electrical Particle Generator (EPG): Environmental Flexibility
By simply encasing or coating said closed loop Electrical Particle Generator (EPG) with a waterproof material, said electrical generator (EPG) can be used underwater or in the deepest realm of space.